
Research
My research focuses on visual localization in GPS-denied environments, combining deep learning with geometric reasoning to build accurate and deployable positioning systems using only passive sensors.
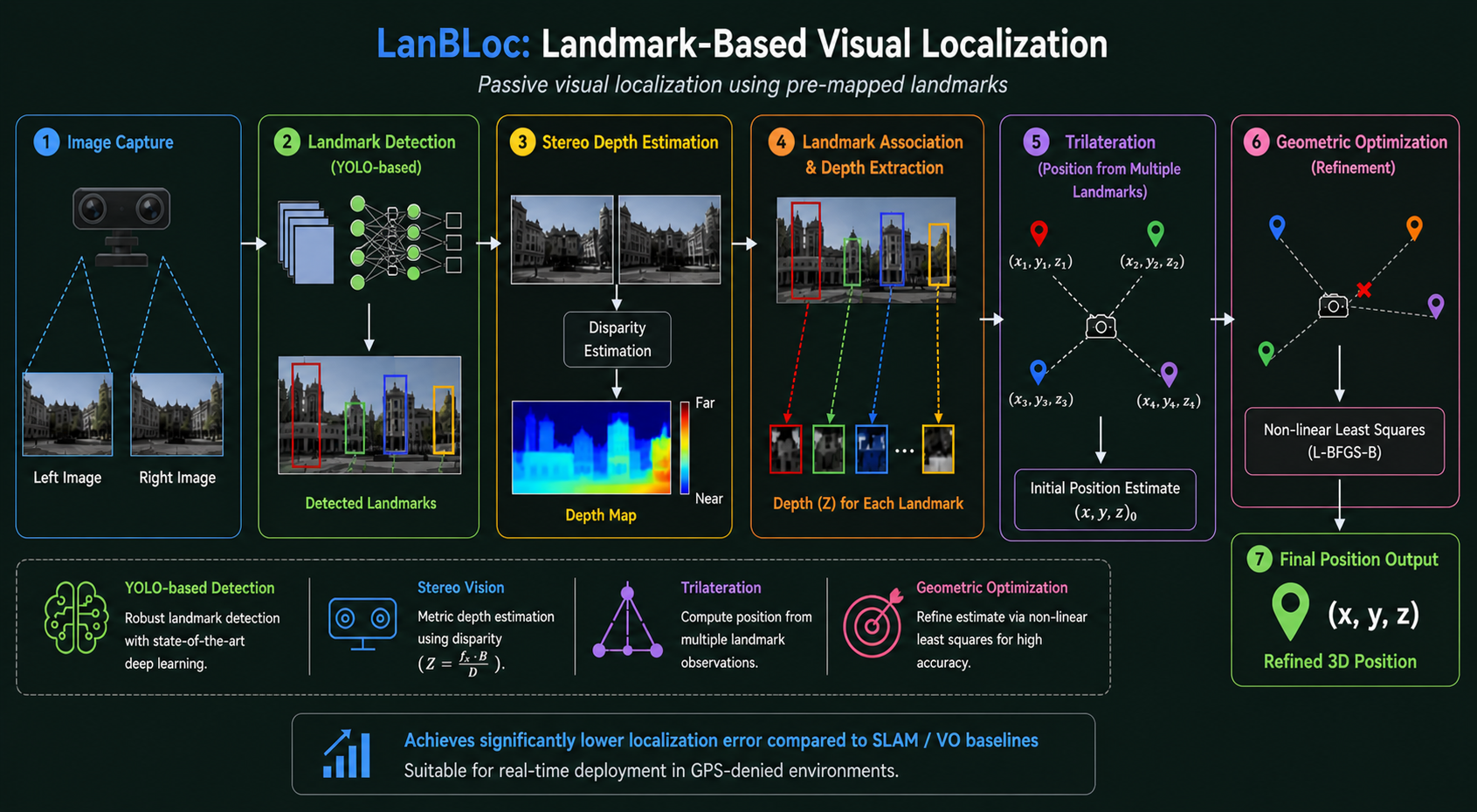
LanBLoc: Landmark-Based Visual Localization
A passive visual localization framework that replaces traditional radio-based anchors with pre-mapped visual landmarks.
- Landmark detection using YOLO-based deep learning models
- Stereo vision for metric distance estimation
- Trilateration for position computation from multiple landmark observations
- Geometric optimization for refined, accurate estimates
Achieves significantly lower localization error compared to SLAM/VO baselines and is suitable for real-time deployment.
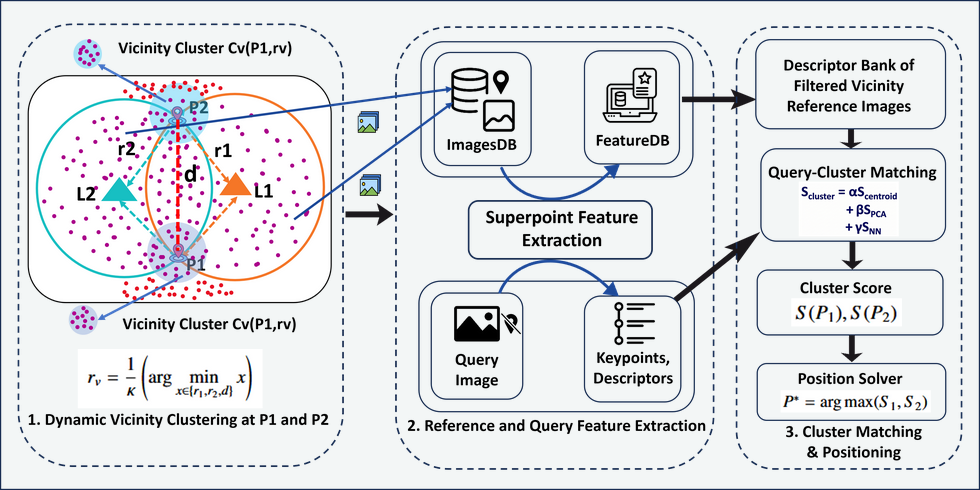
LanBLoc-2L: Two-Landmark Localization
Extending LanBLoc to operate with fewer landmarks by resolving geometric ambiguity through candidate generation and image-retrieval-based disambiguation.
Cross-View Geo-Localization
Exploring alignment between drone and satellite views for large-scale UAV geo-localization using viewpoint-invariant feature learning and coarse-to-fine retrieval.
Model Benchmarking
Systematic evaluation of detection architectures for landmark recognition:
- YOLO variants (v5–v12)
- Transformer-based detectors (RT-DETR)
- Two-stage models (Faster R-CNN)
Focused on precision, recall, mAP, inference latency, and deployment feasibility.
Research Vision
My long-term goal is to develop scalable, infrastructure-free localization systems that operate reliably in real-world, constrained, and adversarial environments – fully passive, hybrid learning + geometry, deployable on edge devices.